
















 302 / 340
302 / 340

302
Astronautics
Astronautics
Real-time tele-robotics in space – space technologies – exploration and human spaceflight –
nano satellites – spaceflight systems engineering – hypervelocity lab
Prof. Prof. h.c. Dr.
Dr. h.c. Ulrich Walter
n
In 2016, the Institute of Astronautics continued its multi-faceted
research for the development of novel satellite and space exploration
technologies including:
n
Spacecraft/CubeSat nano-satellite and
sub-system development.
n
Real-time teleoperation technologies
for On-Orbit Servicing including novel
satellite communication systems,
applications and architectures.
n
Exploration technologies, incl. lunar
regolith processing and resource
extraction, and analysis of life support
systems of habitats and space suits.
n
Space environment testing including
high velocity impact physics, lunar
dust abrasion/damage mitigations, and
micrometeoroid/space debris simula-
tion and assessment.
TU Munich’s planned second pico-
satellite MOVE-II
took shape in 2016 and
successfully completed its Critical Design
Review in November 2016, paving the
way for manufacturing in 2017 and launch
in 2018. More than 110 students of the
student group WARR and LRT staff are
involved in the MOVE-II satellite project,
using LRT and TUM facilities such as the
machine shop, satellite clean room, as
well as in-house design, integration
and environmental test facilities.
On-Orbit Servicing
is an
anticipated future field of
robotic
space activities, where satellites
or other spacecraft in space
are serviced (such as refueling,
maintenance/upgrade or
deorbiting if defunct) by a
robotic servicing satellite.
LRT research focuses on
teleoperating the servic-
ing satellite in near real
time using appropri-
ate delay-tolerant
human machine
control interfaces.
RACOON, our large
relative motion
simulation environment
(6 m x 10 m x 5 m), can
simulate the proximity
operations of two satellites, while the
operator is located in the institute’s
mission control center or anywhere on
Earth. Realistic delayed teleoperation is
characterized through actual near real-
time satellite links via a ground station on
top of the institute’s building and a relay
satellite in geostationary orbit.
High-performance communication
Sub-system technologies, essential for
telerobotics missions, novel commu-
nication architectures and innovative
Earth applications such as the use of
Ka-band communications for emergency
services and appropriate virtual reality
operator environments are developed
in DLR-funded research projects. User
studies develop and evaluate novel
human machine interfaces including
audio feedback and virtual reality displays
for increased situation awareness. The
third Ph.D. thesis associated with the
RACOON-Lab and supported by a Munich
Aerospace scholarship was completed
in 2016 on real-time optimized approach
trajectories using relative motion sensors.
Our
robotic exploration activities
,
initiated originally as LUISE (Lunar In-Situ
Resource Experiment) and focusing on
solar-wind implanted particles), have
now evolved in 2016 into several funded
research projects (PROSPECT, LUVMI,
MARVIN) on lunar regolith processing,
including thermal and chemical extraction
methods of volatiles, including both
stationary gas extraction and analysis
experiments as well as mobile prospector
instruments and mechanisms. Addition-
ally, our research in robotic exploration in
extreme environments (Helmholtz project
ROBEX) develops thermal simulation tools
for the Moon and Mars, and experimen-
tally investigates the extreme, abrasive
effects of the lunar dust environment and
dust impingement on technical surfaces
and mechanisms.
For the renewed interest of NASA and ESA
in
human space exploration
, the Institute
www.lrt.mw.tum.de/ office@lrt.mw.tum.dePhone +49.89.289.16003
Contact
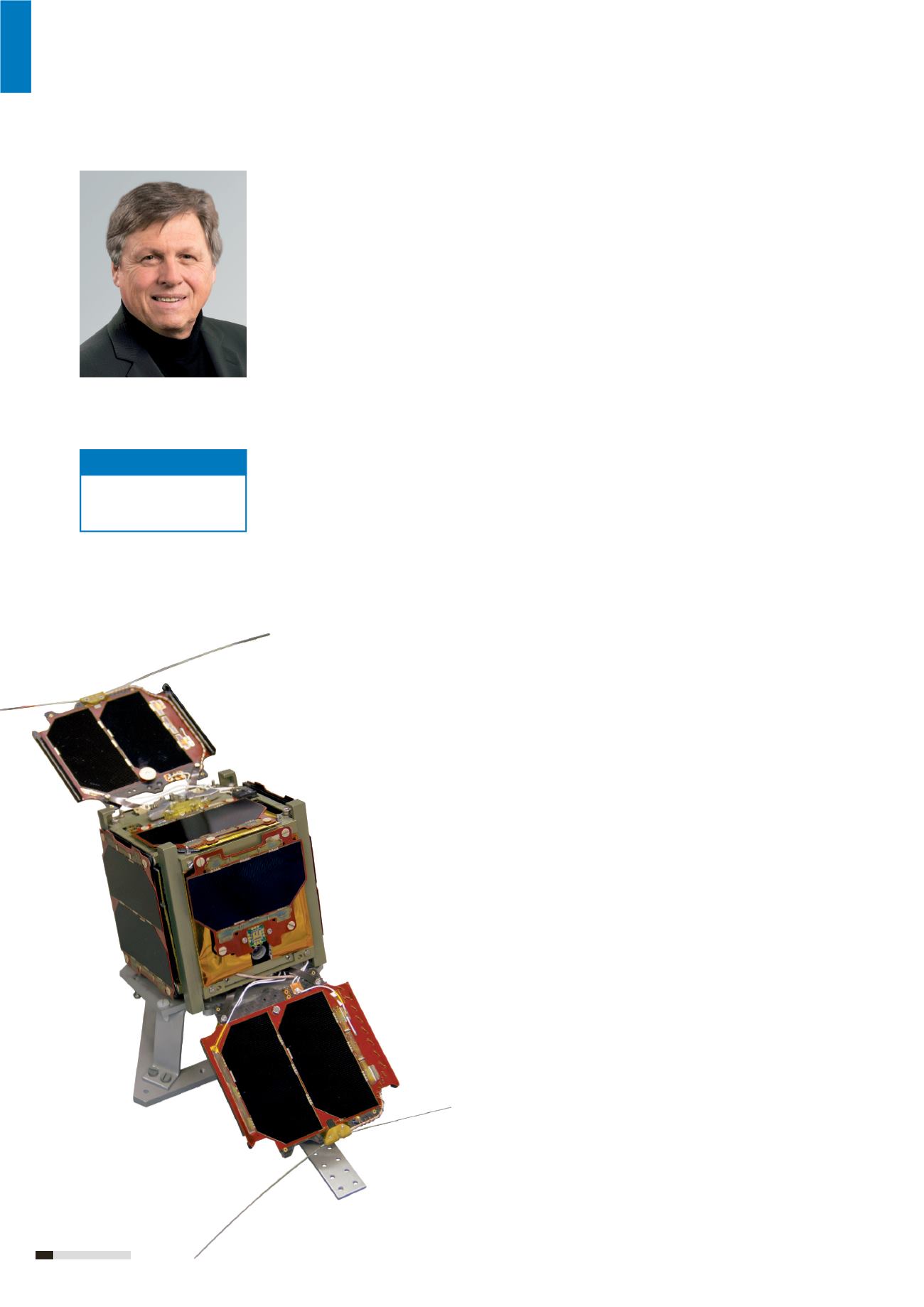
MOVE-I with deployed solar
arrays (launched Nov. 2013)