
















 82 / 340
82 / 340

82
Ergonomics
Ergonomics
Definition and evaluation of human-machine interaction and anthropometric layout
of technical systems. Safety, efficiency of use and user satisfaction.
Prof. Dr. phil.
Klaus Bengler
n
The focus of the Chair of Ergonomics in 2016 was to further increase
the activities in the area of cooperative interaction between human and
vehicle or human and robots on a global level. National and international
funded project proposals were successful to continue the fundamental
research at the institute.
www.ergonomie.tum.de sekretariat.lfe.mw@tum.dePhone +49.89.289.15388
Contact
The second focus was to intensify the
development and research activities on
industry and mobility 4.0 (Industrie und
Mobilität 4.0). Regarding this, the institute
had research activities in production
ergonomics. The resulting approach of
user-oriented assistance has now been
implemented in the form of different
prototypes, for example an exoskeleton
for manual handling tasks and a new
collaborative system. The increasing
digitalization makes it possible to rethink
human-machine interaction. Automated
vehicle guidance also shows questions
regarding cooperation between different
road users. The simulators at the Chair of
Ergonomics help to answer these research
questions.
KobotAERGO – Adaptive Collaborative Robots
as Age-adjusted Companion for an Ergonomic
and Flexible Material Handling
Collaborative robots, also known as
Cobots, represent handling systems that
combine characteristics of industrial
robots and manually-operated manip-
ulators (e.g. balancers). The goal of
these novel solutions is to combine the
respective advantages of each other and
close the gap between their system limits;
easy physical interaction and low cost
of manually-operated manipulators on
the one hand and the precision, pro-
grammability, path guidance and power
amplification of an industrial robot on the
other. Previous Cobot developments (e.g.
intelligent assist devices, IADs) served as
the basis for the development of adaptive,
adaptable, cooperative system concepts.
A human-centered design approach
was used in the project KobotAERGO to
investigate the adaptability of new Cobot
systems and the design of ergonomic
admittance control strategies for haptic
human-robot collaborations.
Goal of the project was to provide an opti-
mal and flexible adaptation of the Cobot
to the physical abilities and needs of each
individual in the field of sensorimotor and
cognitive skills. In the context of a simple
and natural, intuitive, transparent, and
interactive process-oriented operation.
Results of all human factors related
studies can be found in the publications of
Schmidtler et al.
(https://www.lfe.mw.tum.
de/author/schmidtler/).
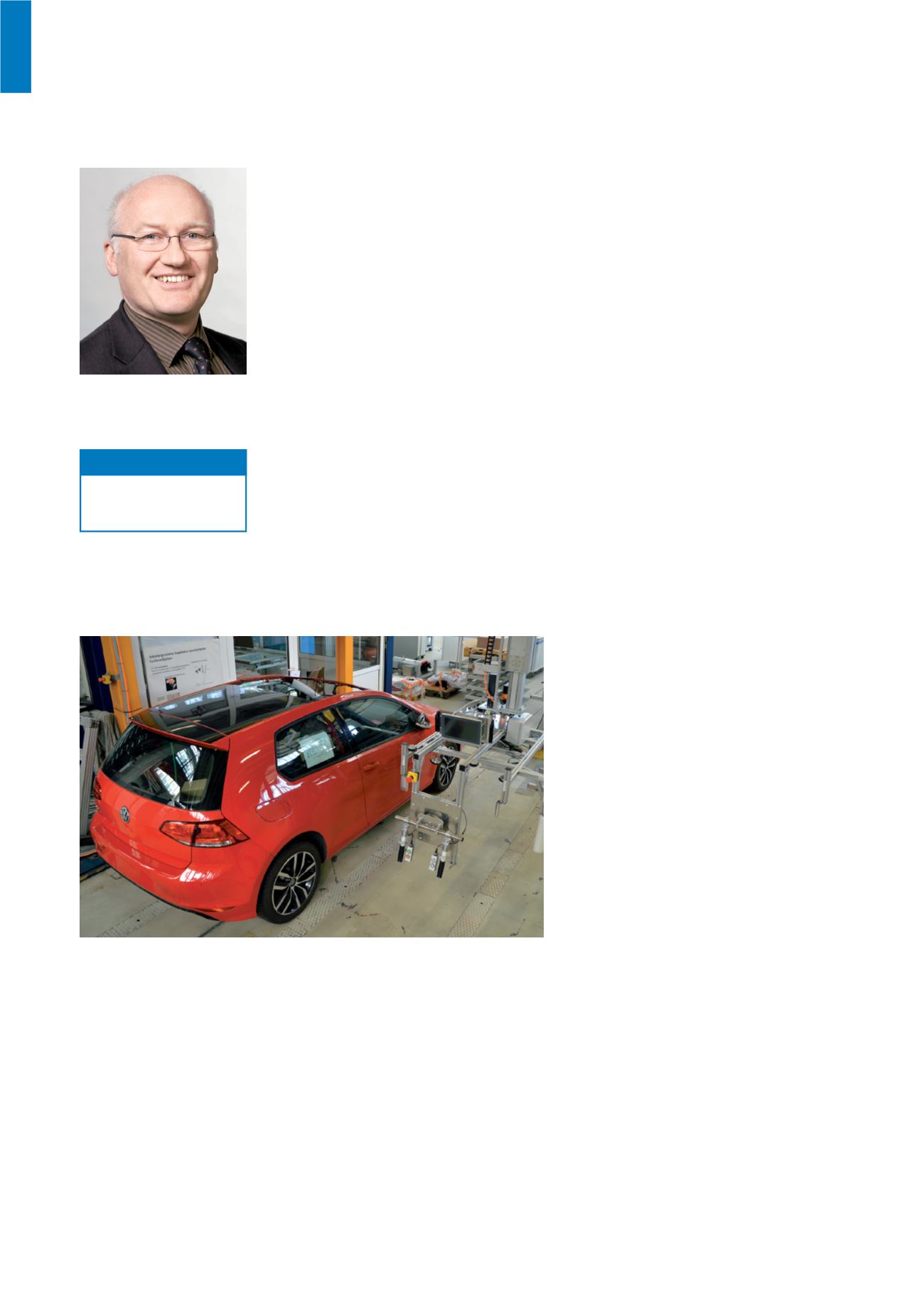
KobotAERGO demonstrator –
force amplifying intelligent assist
device for panoramic sunroof
assembly (Reference: Fraunhofer
IPK, KobotAERGO)