
















 184 / 340
184 / 340

184
Automatic Control
Automatic Control
Model-based analysis and design allow for the successful control of complex dynamical systems
Prof. Dr.-Ing. habil.
Boris Lohmann
Active and Semi-Active Suspension Control
the development of a nonlinear feedback
control in combination with nonlinear
state observation techniques as well
as proactive preview control. Thereby,
different design objectives can trans-
parently be achieved, while design
restrictions like state and input constraints
can be taken into account. The so-called
hybrid suspension system, developed at
our institute, is shown in the figure left;
it includes a low-bandwidth actuator F(t)
and a high-bandwidth variable damper
d
c
(t), together with a sophisticated control
system.
www.rt.mw.tum.de sekretariat@rt.mw.tum.dePhone +49.89.289.15610
Contact
n
The institute is focused on both the development of methods and their
practical application. For an efficient control of technical processes, new
techniques are devised in nonlinear control, energy-based modeling
and design, the control of distributed parameter systems, model order
reduction, as well as adaptive and predictive control and methods of
optimization and computational intelligence. Moreover, a Collaborative
Research Centre puts a spotlight on the modeling and analysis of non-
technical systems. Just recently, new cooperations within a DFG priority
program and within a joint international ANR-DFG funding initiative were
established.
Concerning the application, highly challenging problems include the
treatment of vibrations in automobiles, the robust control of multicopters,
the control of unstable robots, and the feedback control of industrial
processes.
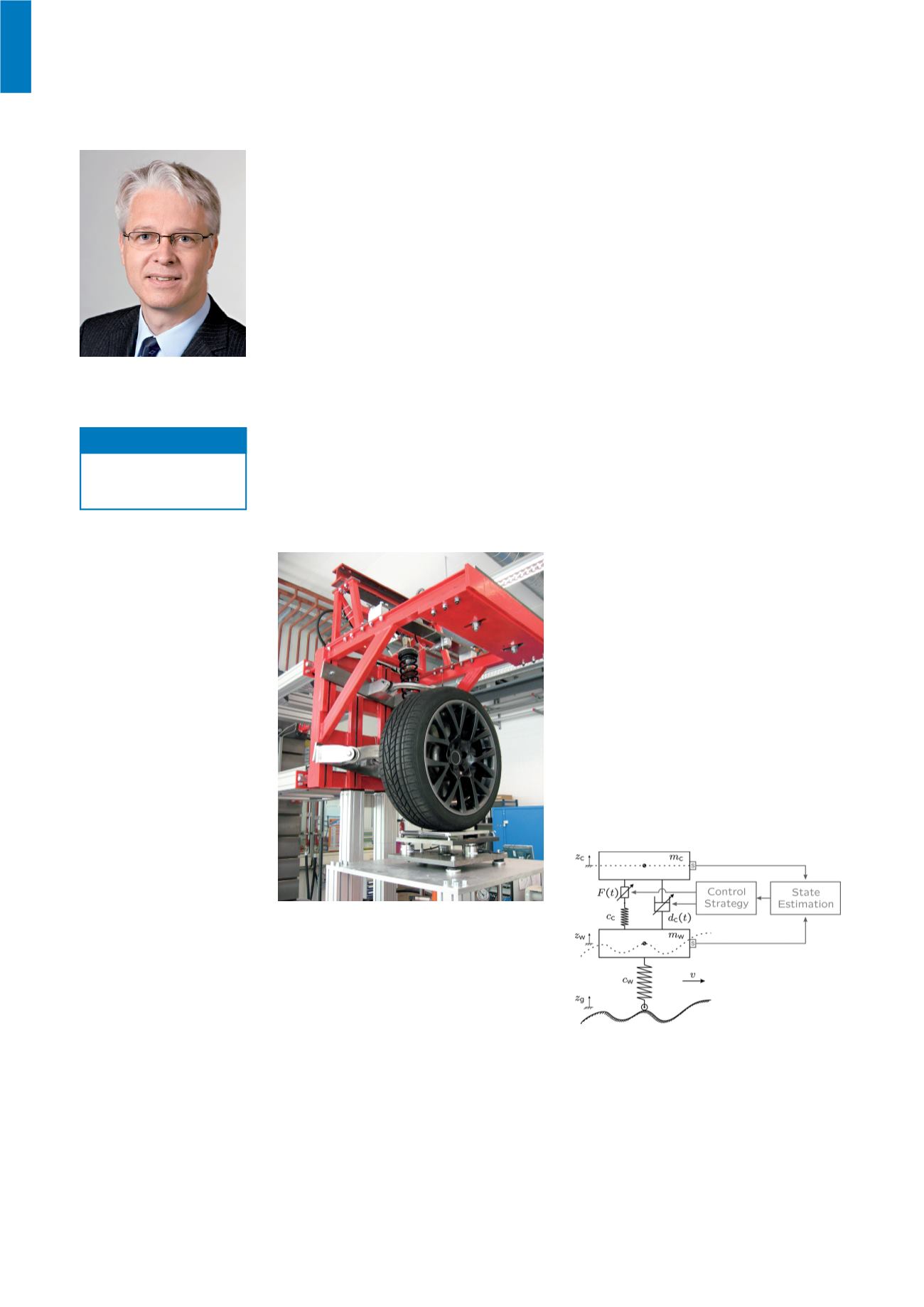
Hybrid suspension system controlled by a state
estimator and feedback controller
Experiments are performed at two quarter-car test
stands available in the Institute of Automatic Control.
Active suspension systems can signi-
ficantly contribute to the comfort and
safety of passenger cars by minimizing
vibrations acting on passengers and by
reducing dynamic wheel load. Recent
developments of our research include