

















 155 / 308
155 / 308

155
Flight System Dynamics
Since the novel aircraft configuration had never flown
before, design and testing of the automatic control system
were conducted exclusively with simulation models.
Unfortunately, such models inevitably represent the
behavior of the real aircraft merely up to a certain degree
of accuracy, i.e., they exhibit a broad band of multiple
uncertainties. It was thus a major driver for the design of
the automatic flight control algorithms to ensure sufficient
flight performance even if the aircraft behaved very differ
ently in reality than in simulation.
The effort of the engineers was rewarded with extremely
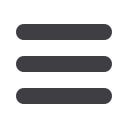
successful flight tests. The maiden flight of the SAGITTA
Demonstrator could be conducted fully automatically and
exactly as planned. Since the aircraft and flight control
Unmanned SAGITTA Demonstrator on its fully-automatic maiden flight
Image: Airbus Defence and Space, Zeitler
system performed so well during the whole first-flight
mission, a second flight in identical configuration was
conducted successfully with additional mission segments
just after the maiden flight.
Projects:
■■
Total capability approach to highly accurate and safe
guidance applied to an automatic landing system
(Phase B, BMWi)
■■
Development of an autopilot for RPAS with fixed-wing,
rotary-wing or hybrid configuration (BMWi)
■■
Development of the flight control system for an unsta-
ble tailless jet (industry)
■■
Development of innovative adaptive flight control
algorithms for non-minimum phase systems (industry)
■■
Model-based development of a certifiable avionics
system for unmanned aerial vehicles of 5kg to 2000kg
(industry).
■■
Development and integration of an autopilot system for
a Class IV CS-23 aircraft (industry).
■■
Development of a full envelope autopilot system for a
long endurance, high altitude aircraft (LuFo) started in
2016
■■
Development of a fuel-optimal autothrottle and flight
guidance system for CS-23 aircraft (LuFo) started in
2016
■■
All-electric unmanned reconnaissance and aerial
imaging airborne system (BMWi) started in 2017
Sensors, Navigation and Data Fusion
Navigation sensors and systems provide crucial informa-
tion on aircraft flight states, such as position, velocity and
orientation, required for flight state control and flight path
guidance. Consequently, the performance of flight state
control and hence safety greatly depends on navigation
accuracy and integrity. Furthermore, flight safety and mis-
sion success depend strongly upon availability, continuity
and robustness of navigation.
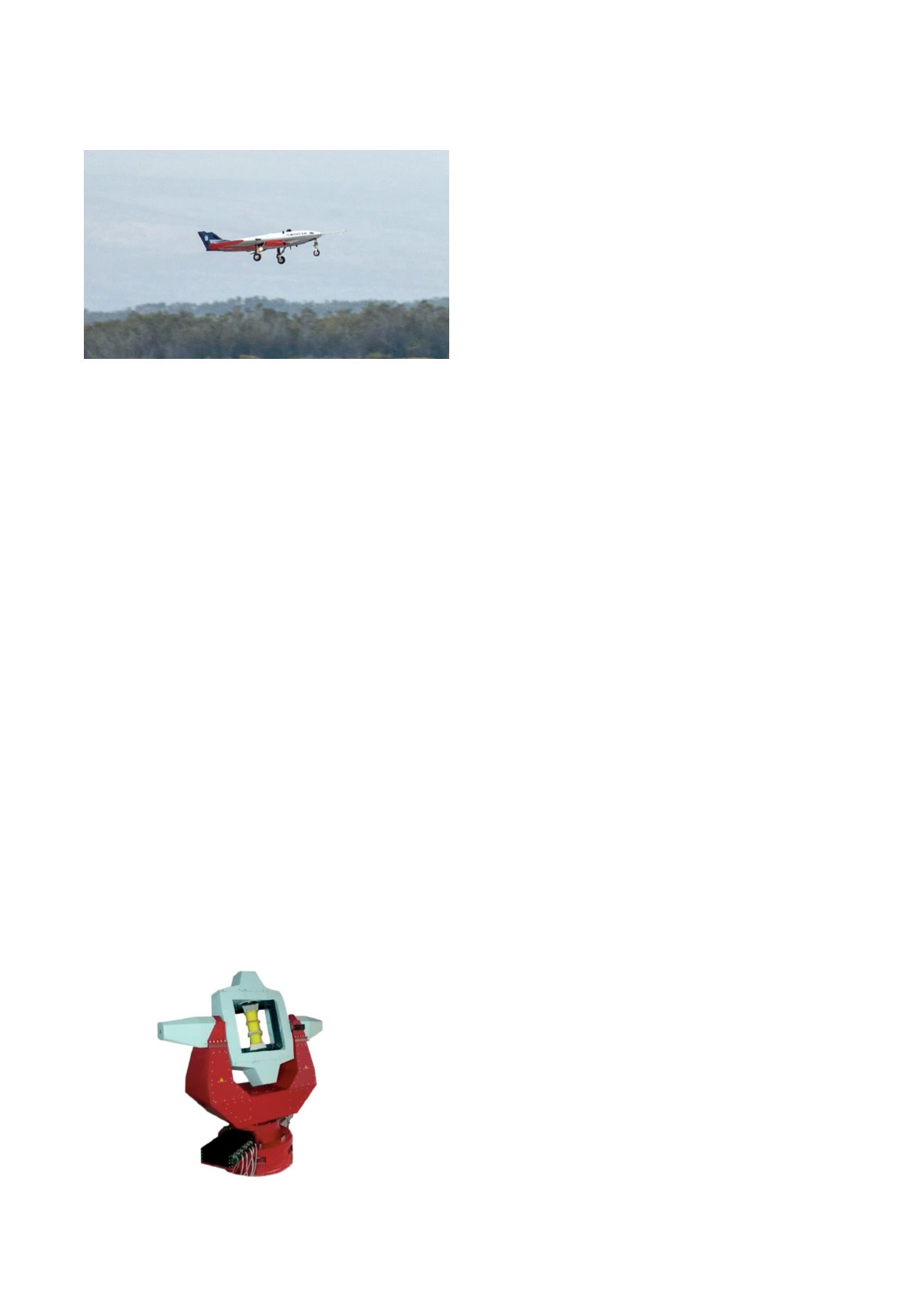
Three-axis motion simulator for inertial sensor testing
The navigation research group at the FSD focused in 2017
on the following key enabling technologies:
■■
Inertial sensor and navigation system test facility for
sensor calibration and integrated navigation system
testing
■■
Multi global navigation satellite systems (GNSS) signal
from space and augmentation signal exploitation under
nominal conditions
■■
Platform-autonomous fault-tolerant AD-AHRS, aerody-
namic model aided navigation or surface range-imaging
in GNSS-degraded and denied environments
■■
Navigation system integration architectures with
graceful degradation capability and professional data
fusion algorithms
Projects
■■
Multi-GNSS navigation
■■
Inertial laboratory
■■
Surface, image and model-aided navigation
■■
Fault-tolerant ADAHRS
■■
Sensor driven trajectories