

















 158 / 308
158 / 308

158
Flight System Dynamics
Trajectory Optimization
The trajectory optimization research group gladly wel-
comed respected researchers, among them Associate
Professor Sébastien Gros of Chalmers University of
Technology, who held a well visited series of lectures on
‘Advanced Topics in Optimal Control’.
Furthermore, Professor Joseph Z. Ben-Asher from
Technion University returned for a visit under the TUM
August-Wilhelm Scheer Visiting Professorship Program.
Besides his inspiring lecture on the application of game
theory in aerospace, we made big steps forward in our
joint research topic on optimization and optimal control
based flight control law testing. This method employs
nonlinear optimization algorithms to find ‘worst-case’
system inputs (pilot commands, disturbances) and
parameters that may drive the system to or beyond the
safety boundaries, additionally providing information on
the sensitivity of distinct parameters.
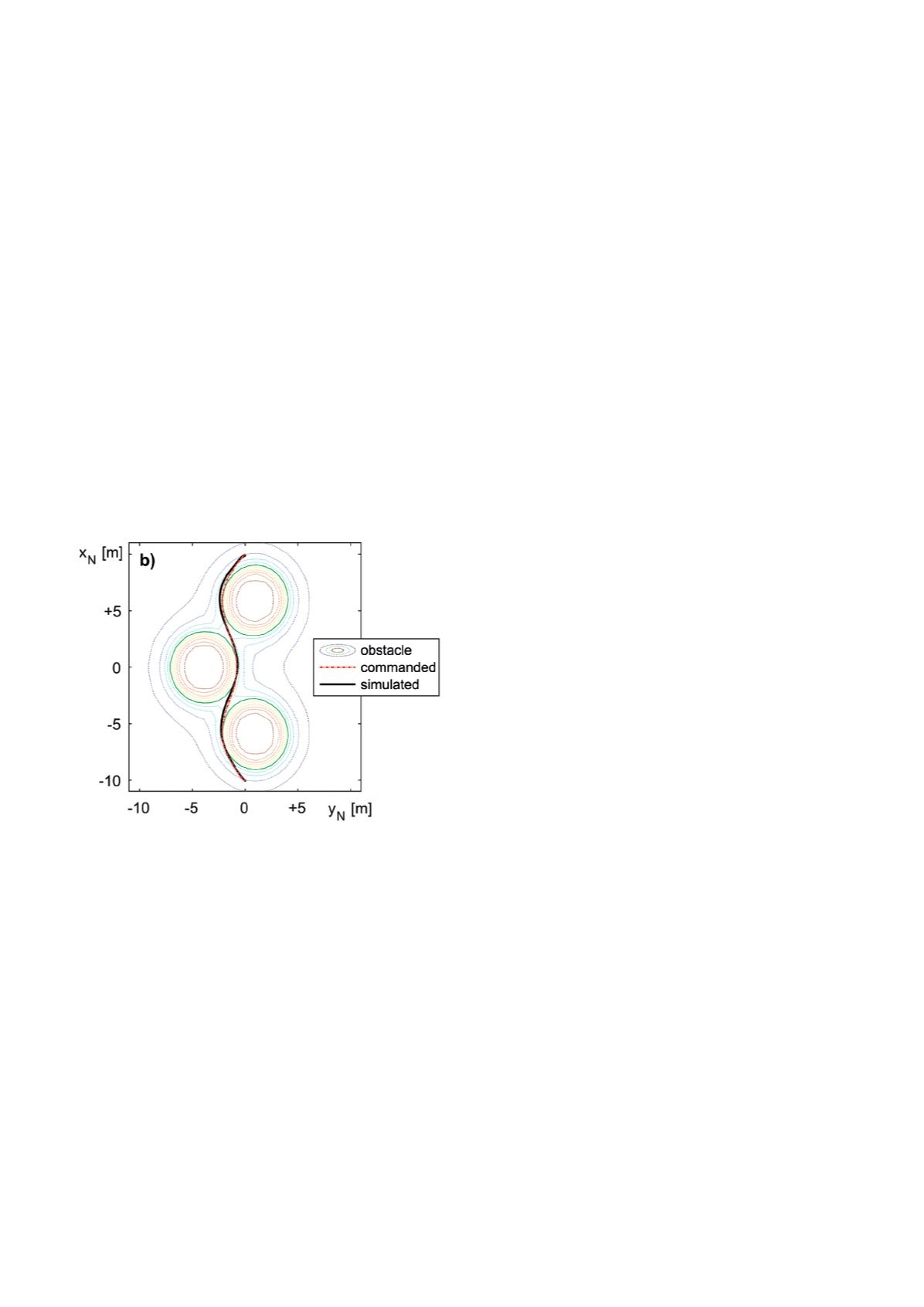
Optimal trajectory to avoid an obstacle
ATM research was continued by developing extended
bilevel algorithms to determine the optimal arrival times
and trajectories. These results will build the foundation of
a new research project starting in 2018.
Within the VaMEx-CoSMiC project, the goal of the trajec-
tory optimization research group was to develop an online
trajectory generation module for path following including
obstacle avoidance. Therefore, a custom online optimal
control tool has been developed. The algorithm has been
implemented and tested onboard a hexacopter.
The skOPTing project focused on determining optimal
trajectories for ski jumpers is ongoing. The current devel-
opment stage is the system identification using optimal
control methods. Data will be obtained during measure-
ment campaigns scheduled for this winter.
A new research project within the scope of the Munich
Aerospace Scholarship Program aims at optimizing the
atmospheric reentry trajectory of a capsule to minimize
heating on or in the vehicle. All projects employ the
in-house developed optimal control tool Falcon.m (www.
falcon-m.com).
Projects
■■
Robust dynamic programming approach to aircraft
control problems with disturbances (DFG)
■■
Optimal control methods in ski jumping (IGSSE)
■■
Valles Marineris Explorer (VaMEx) – Cooperative swarm
navigation, mission and control (CoSMiC) (DLR)
■■
Optimierung des Wiedereintritts zur Minimierung der
Aufheizung oder der Infrarotsignatur (Munich Aero-
space)