

















 156 / 308
156 / 308

156
Flight System Dynamics
Transition Aircraft
for the diversity of existing and future aircraft configura-
tions and maximizing their robustness against unforeseen
disturbances and uncertainties – even the loss of one or
more control effectors.
For the development of the VTOL UAS in particular a
model based approach is chosen, which simulates a vehi-
cle model online on the flight control computer, in order
to compute the real time forces and moments, as well as
their efficiencies on the commands. This enables an opti-
mal distribution of control effector effort and additionally
allows the consideration of secondary objectives, such as
minimizing energy and maximizing safety.
It is a long way from the idea of an aircraft until the first
prototype is ready for flight testing. This holds true for
manned aircraft as well as for unmanned aircraft if the
software and hardware is intended to be designed accord-
ing to processes and standards from manned aviation.
There are many steps within the development process,
which are necessary to ensure that the implementation of
algorithms and the design of the avionic system is done
with the required level of rigor while keeping the objectives
in mind which establish the confidence that the aircraft can
be operated safely. This means that beside the implemen-
tation and design tasks, different verification methods,
adapted from manned aviation development processes are
also used for unmanned aircraft. Beginning from the lowest
level of verification, model-in-the-loop simulation gives
results on software functions and modules, up to hard-
ware-in-the-loop simulations which incorporate all software
modules running on the target system in a closed loop with
a high-fidelity simulation model of the real aircraft.
With the fast-growing market of unmanned aircraft
systems (UAS) new needs on aircraft arise. Especially for
small unmanned aircraft (aka. drones, the term used by
the media) users desire to have plug and play systems. A
new requirement gains importance: flying without given
infrastructure. Imagine your unmanned aircraft stored
in a box in the trunk of your car. You simply drive to the
operating site, unbox and set up the system and start it
right off the meadow in front of you. To do so, your aircraft
needs to be capable of vertically take-off and landing
(VTOL).
The requirement of VTOL is accomplished quite easy by
multicopters. However, those systems only have a short
range and endurance. So why not combine the advantage
of a multicopter (VTOL capability) with those of a wing
born plane (range and endurance)? A transition aircraft
emerges.
Transition aircraft are capable of VTOL and fly wing born
with high efficiency. This offers them a broad range of
applications and market. For UAS VTOL systems, the
design can differ a lot from classic manned aircraft
VTOLs. Electric propulsion and different requirements on
redundancy bring out different concepts. So, VTOL UAS is
becoming a large subject of research.
A major part of this research is occupied by the devel-
opment and implementation of control algorithms on the
quite new vehicle configurations. Besides classical control
objectives such as performance and robustness, the
main focus in modern control techniques includes several
further aspects. A main aspect is reflected by developing
modular, encapsulated and easy-to-adapt control systems
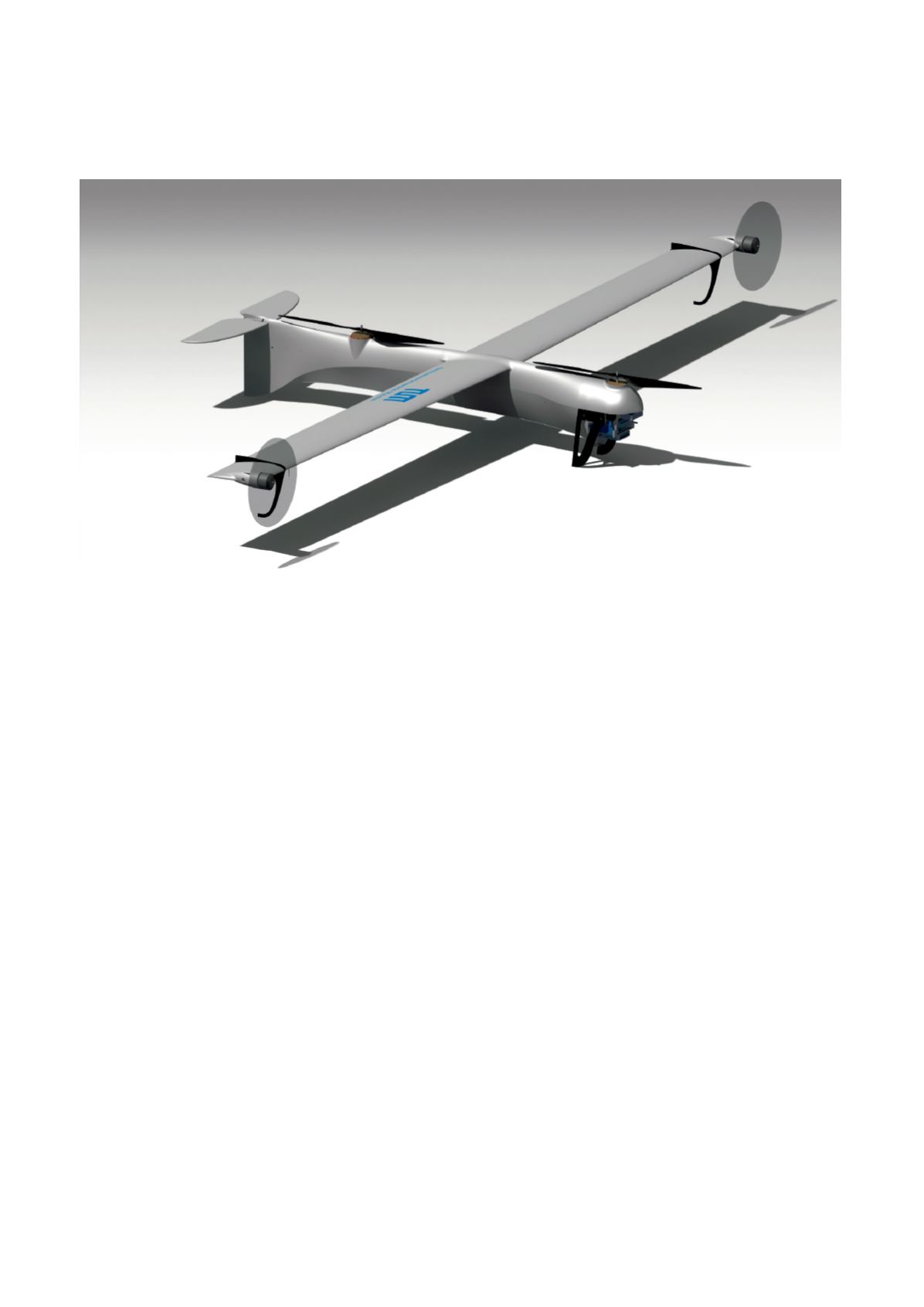
Illustration of a transition aircraft