

















 162 / 308
162 / 308

162
Aircraft Design
Multifunctional System Design for Aircraft Control Devices
Utilizing flight control devices, not only for single functions
but applying a multi-functional approach as already used
in military aircraft design, may lead to reduced system
complexity and thus reduced weight and enhanced
performance on aircraft level. In 2017, the aircraft design
group focused its related research on the following topics:
■■
Development of an integrated design approach for
advanced flight control systems with multi-functional
flight control devices
■■
Parameterized mass estimation tool for flight control
systems
■■
Preliminary design tool for advanced flight control
system architectures
■■
Advanced high-lift control systems with distributed
electric drive architectures
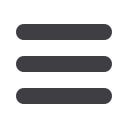
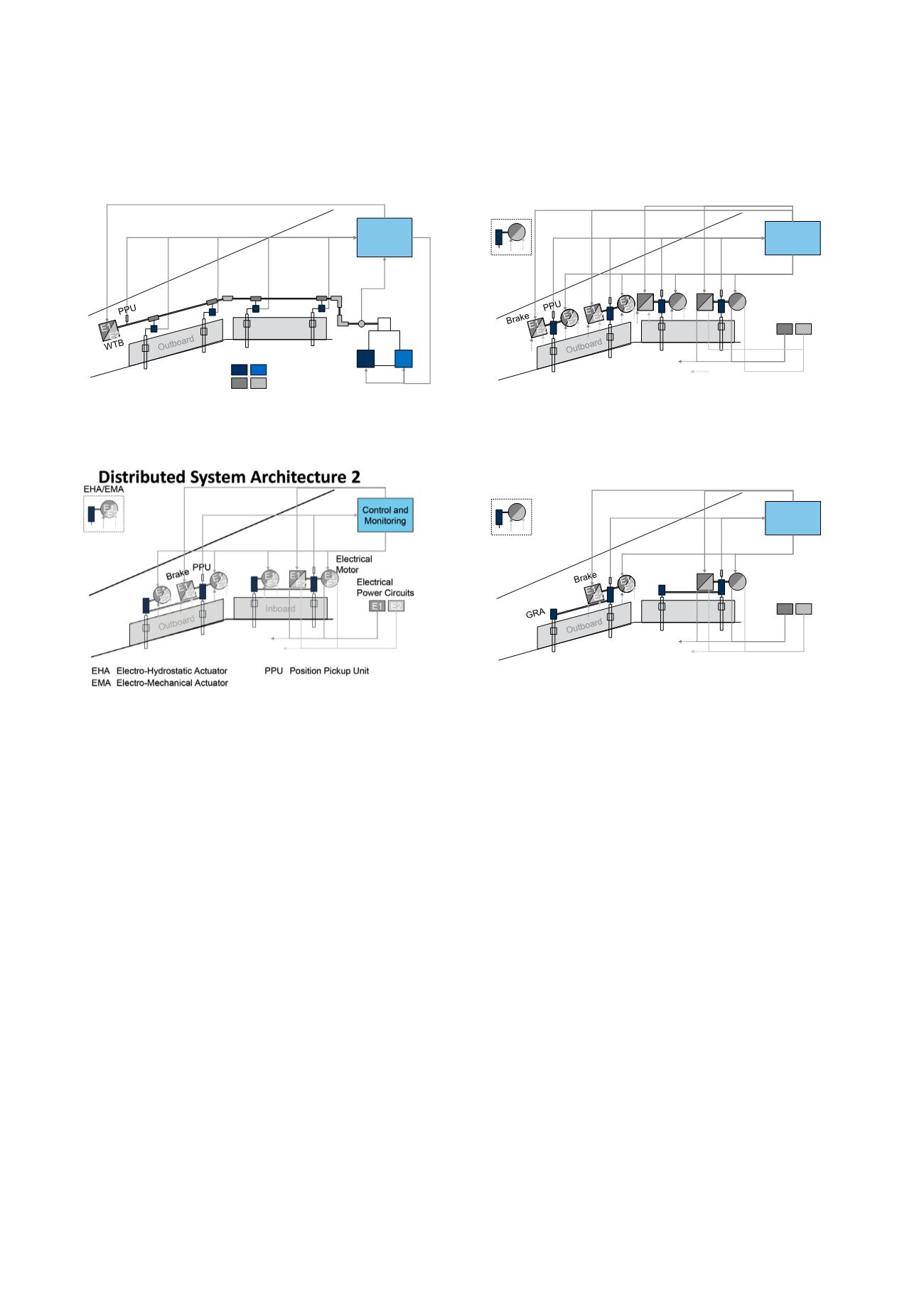
Schematic diagrams of the reference system architecture (RSA) with conventional transmission shaft system and the distributed system architectures (DSA1-3)
with distributed electric drive architectures
One promising approach for a multi-functional architecture
is a distributed electric drive architecture. This provides
the opportunity to enable advanced high-lift control
systems with multifunctional control surfaces driven by
electrical actuators. The aircraft design group has devel-
oped three distributed system architecture concepts using
electrical actuators. The system architectures were devel-
oped in an iterative design process to fulfill the high-lift
system requirements, and comply with safety regulations.
Finally, it can be stated, that distributed system architec-
tures show advantages regarding overall system mass
and direct operating costs compared to a conventional
system architecture.
Inboard
Control and
Monitoring
RGB Right-angle Gearbox
DGB Drive Gearbox
KGB Kink Gearbox
PCU Power Control Unit
PPU Position Pickup Unit
RA Rotary Actuator
STL System Torque Limiter
WTB Wing Tip Brake
Flap
PCU
H1
H2
RGB
KGB
RGB
STL
DGB
RA
Power Circuits
H1 H2
E1 E2
Hydraulic
Electrical
Reference System Architecture
Control and
Monitoring
Inboard
Electrical
Power Circuits
E1 E2
E2
E1
E2
E1
E2
E1
E2
E1
E1E2
EHA/EMA
EHA Electro-Hydrostatic Actuator
EMA Electro-Mechanical Actuator
PPU Position Pickup Unit
Electrical
Motor
Distributed System Architecture 1
E1
E2
EHA/EMA
Control and
Monitoring
Inboard
PPU
Electrical
Power Circuits
E1 E2
E1
E2
E1
E2
E1
E2
E1
Electrical
Motor
EHA Electro-Hydrostatic Actuator
EMA Electro-Mechanical Actuator
PPU Position Pickup Unit
Distributed System Architecture 2
E1
E2
EHA/EMA
Control and
Monitoring
Inboard
PPU
Electrical
Power Circuits
E1 E2
E1
E2
E1
E2
E1
Electrical
Motor
EHA Electro-Hydrostatic Actuator
EMA Electro-Mechanical Actuator
PPU Position Pickup Unit
GRA Geared Rotary Actuator
Distributed System Architecture 3
Inboard
Control and
Monitoring
RGB Right-angle Gearbox
DGB Drive Gearbox
KGB Kink Gearbox
PCU Power Control Unit
P U Position Pickup Unit
RA Rotary Actuator
STL System Torque Lim ter
WTB Wing Tip Brake
Flap
PCU
H1
H2
RGB
KGB
RGB
STL
DGB
RA
Power Circuits
H1 H2
E1 E2
Hydraulic
Electrical
Reference System Architecture
Control and
Monitoring
Inboard
Electrical
Power Circuits
E1 E2
E2
E1
E2
E1
E2
E1
E2
E1
E1E2
EHA/EMA
EHA Electro-Hydrostatic Actuator
EMA Electro-Mechanical Actuator
P U Position Pickup Unit
Electrical
Mot r
Distributed System Architecture 1
E1
E2
EHA/EMA
Control and
Monitoring
Inboard
P U
Electrical
Power Circuits
E1 E2
E1
E2
E1
E2
E1
E2
E1
Electrical
Mot r
EHA Electro-Hydrostatic Actuator
EMA Electro-Mechanical Actuator
P U Position Pickup Unit
Distributed System Architecture 2
E1
E2
EHA/EMA
Control and
Monitoring
Inboard
P U
Electrical
Power Circuits
E1 E2
E1
E2
E1
E2
E1
Electrical
Mot r
EHA Electro-Hydrostatic Actuator
EMA Electro-Mechanical Actuator
P U Position Pickup Unit
GRA Geared Rotary Actuator
Distributed System Architecture 3
Inboard
Control and
Monitoring
R B Right-angle Gearbox
D B Drive Gearbox
KGB Kink Gearbox
PCU Power Control Unit
PPU Position Pickup Unit
RA Rotary Actuator
STL System Torque Limiter
WTB Wing Tip Brake
Flap
PCU
H1
H2
RGB
KGB
RGB
STL
DGB
RA
Power Circuits
H H
E1 E2
Hydraulic
Electrical
Reference System Architecture
Control and
Monitoring
Inboard
Electrical
Power Circuits
E1 E2
E2
E1
E2
E1
E2
E1
E2
E1
E1E2
EHA/EMA
EHA Electro-Hydrostatic Actuator
EMA Electro-Mechanical Actuator
PPU Position Pickup Unit
Electrical
Motor
Distributed System Architecture 1
E1
E2
EHA/EMA
Control and
Monitoring
Inboard
PPU
Electrical
Power Circuits
E1 E2
E1
E2
E1
E2
E1
E2
E1
Electrical
Motor
EHA Electro-Hydrostatic Actuator
EMA Electro-Mechanical Actuator
PPU Position Pickup Unit
Distributed System Architecture 2
E1
E2
EHA/EMA
Control and
Monitoring
Inboard
PPU
Electrical
Power Circuits
E1 E2
E1
E2
E1
E2
E1
Electrical
Motor
EHA Electro-Hydrostatic Actuator
EMA Electro-Mechanical Actuator
PPU Position Pickup Unit
GRA Geared Rotary Actuator
Distributed System Architecture 3