

















 129 / 308
129 / 308

129
Materials Handling, Material Flow, Logistics
Planning and Control of Material Flow Systems
Especially in the beginning, technology-oriented startups
often focus on key issues like technical development,
financing and marketing. They often consider logistics
aspects only in a late development phase, when a lot of
money, capacity and manpower have already been spent
on special processes, unfavorable supplier contracts or
inefficient storage of material. To give advice on how to
create efficient logistics, the chair fml develops a flexible
logistics concept for technology-oriented startups called
‘StartupLog’. This concept grows with the startup and
is especially tailored to its requirements. The basis is
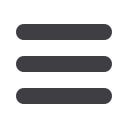
a development model which defines the development
stages of technology-oriented startups. Using different
characteristics and indicators a startup can easily classify
itself into one of the phases and can derive the logistics
challenges that currently have to be considered. For
each logistics challenge, startup-specific methods are
developed in the project, which will be summarized in a
guideline.
Projects
■■
Dynamische Routenzugsteuerung für kurzfristig
schwankende Transportbedarfe (DFG)
■■
ETKoop – Effizienzsteigerung durch kooperatives
Bestandspooling von Ersatzteilen (IGF)
■■
FlexiBeam – Entwicklung eines flexiblen Beamerwagen-
systems für manuell kommissionierbare Stückgüter (IuK
Bayern)
■■
Flexibilitätssteuerung der Inbound-Logistik im volatilen
Umfeld der Nutzfahrzeugindustrie (MAN.TUM)
■■
Routenzugsystem 4.0 (MAN.TUM)
■■
StartUpLog – Entwicklung eines adaptiven Logistik-
konzepts für technologieorientierte Startup-Unterneh-
men (IGF)
A startup-specific development model helps to identify which logistics challenges are to be considered when.
Crane Engineering and Design of Load-supporting Structures
Research in the fields of crane engineering and design of
load-supporting structures has a long tradition at the chair
fml.
Important topics within this field are both the development
of new calculation methods for mobile cranes in order
to significantly increase calculation accuracy and the
realization of user-oriented control systems to simplify
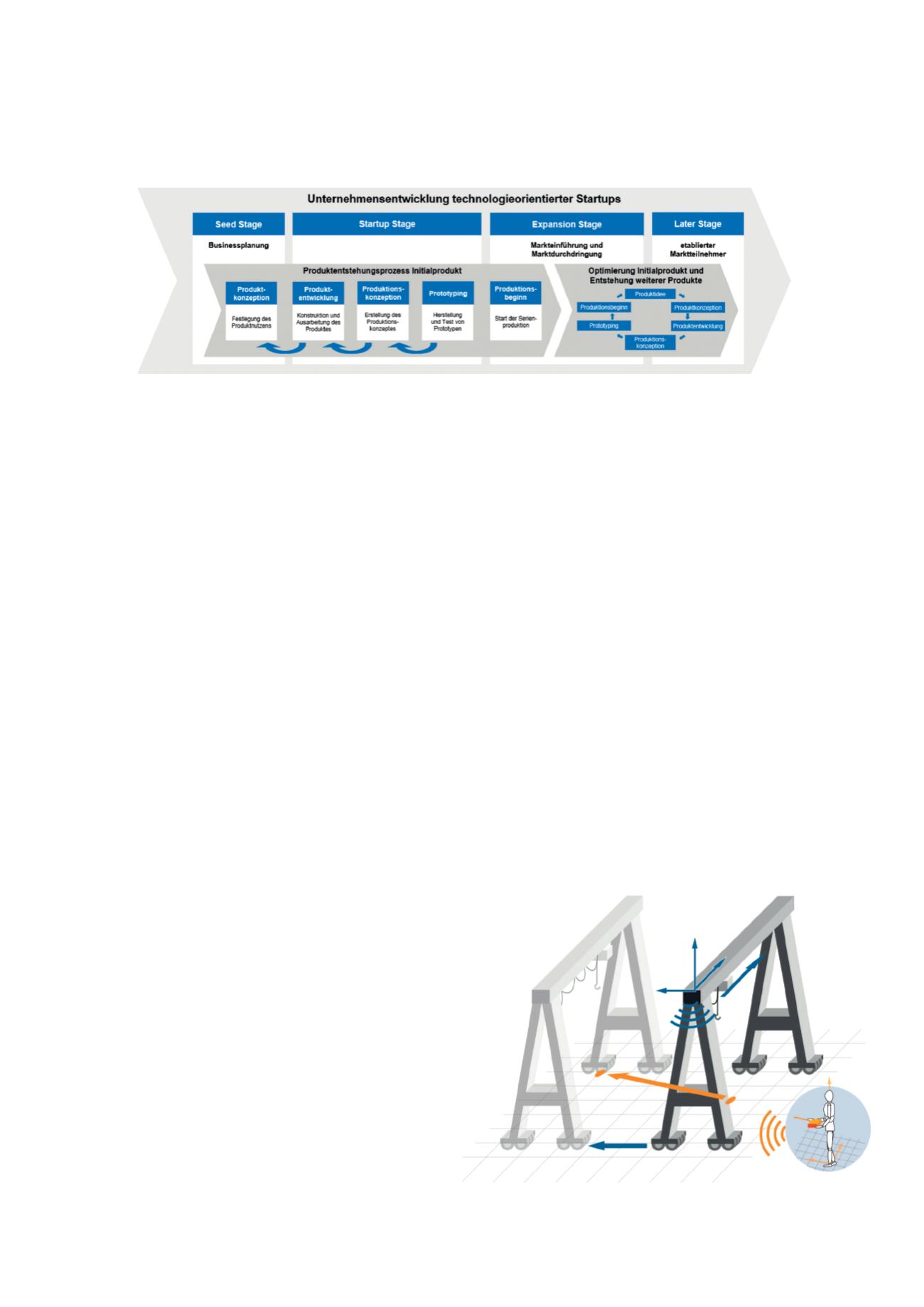
crane operation. Many crane types are operated with radio
controls that allow free operator movement while moving
the load in the desired way and thus assure maximum
flexibility and safety. However, the operator still needs to
calculate the individual movement for each drive in a way
that the hook movement matches the operator’s wish.
Depending on the number and type of drives (e.g. slewing,
trolley movement, hydraulic cylinders) this calculation
requires a substantial amount of experience and con-
Operating a crane with an intuitive control