

















 194 / 308
194 / 308

194
Micro Technology and Medical Device Technology
Automated Design Process of Manipulators for Minimally Invasive Surgery
Since minimally invasive surgery is distinguished by signif-
icant benefits for the patient, today’s research focuses on
the development of novel instruments for this advancing
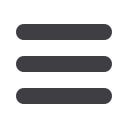
field. The developed Single Port Overtube Manipulator
(SPOT) is designed as an overtube structure for standard
endoscopes and possesses working channels that fit for
standard endoscopic instruments. Thereby, the system
can be adapted to the equipment the surgeon is used to.
For the actuation a novel electrical control unit can be
used beside the established mechanical control unit. The
shape of the manipulator (i.e. workspace of the manipula-
tor arms) can easily be adapted to the patient’s anatomy
by using the automated design process in combination
with 3D printing as the manufacturing method. Further-
more, the design process now allows for the adaption of
the system to different surgical tasks. Thereby, current
research focuses on the investigation on thin-walled
structures fabricated using additive manufacturing and
their clinical evaluation.
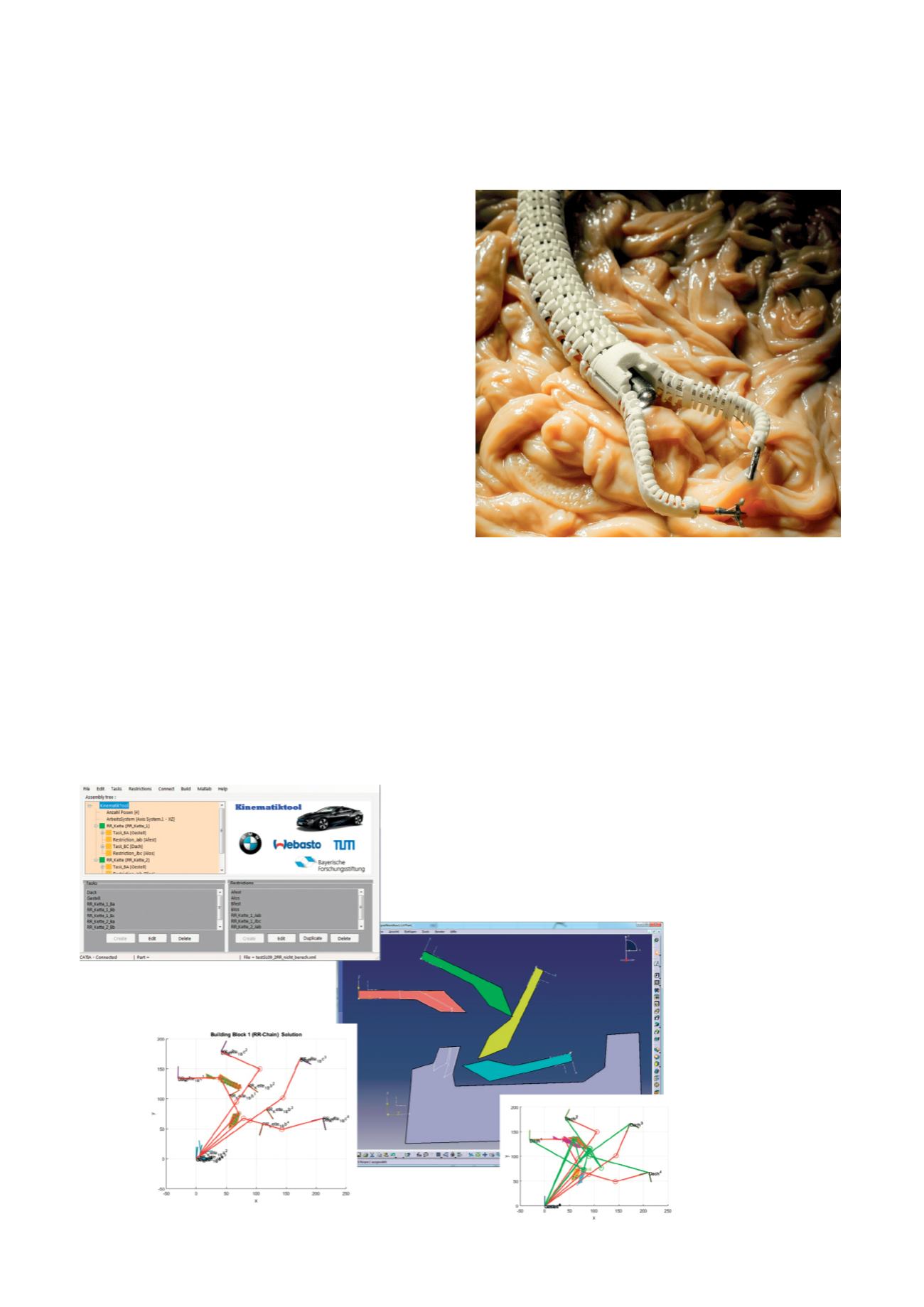
Kinematic Design and Rapid Prototyping
This project focuses on supporting the design of kine-
matic linkages. Therefore software tools are developed to
support, accelerate and reduce the costs of the design
processes. These are based on state-of-the-art methods
of kinematic design as well as those being subject of
research and are integrated into CAD software. Further-
CAD-integrated kinematic
design (MiMed)
more, this project investigates the similitude of original
mechanisms and model mechanisms manufactured
with rapid prototyping techniques. This work is done in
collaboration with BMW AG and Webasto Edscha Cabrio
GmbH and is funded by the Bayerische Forschungs
stiftung (BFS).
Patient individual SPOT manipulator (MiMed)