

















 189 / 308
189 / 308

189
Automatic Control
Structured modeling and order reduction of coupled
phenomena.
Within the DFG-ANR funded project
INFIDHEM we develop in a first stage structured, high-di-
mensional numerical models for the heat transfer on dual
complexes, as given by the structure of catalytic foams.
The structure of the models will be preserved in a second
stage of parametric model order reduction.
Representation of a regular
metallic foam based on
Kelvin cells. Image data from
LGPC Lyon, processed with
iMorph
Model Order Reduction
The modeling of dynamic systems
frequently leads to large sets of
differential equations. The goal of
model order reduction is to find a
much smaller (reduced) model preserving the most impor-
tant properties of the original model. Recent research
in our group deals with reducing parameter-dependent
systems, nonlinear systems, mechanical structures,
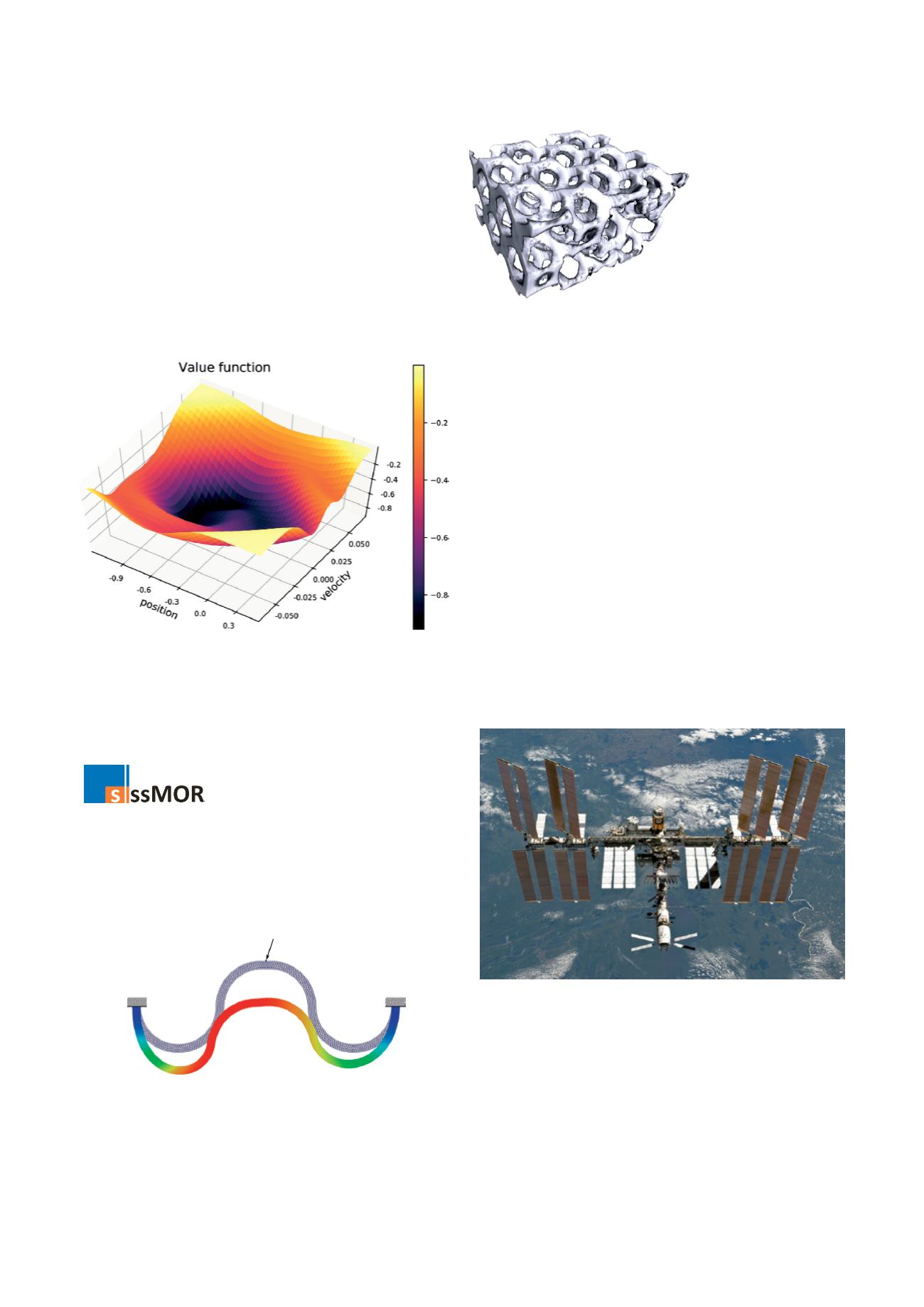
Nonlinear FE modeling allows for consideration of structural dynamics
with large deformations. Further analysis, optimization and control of the
resulting high-order models require prior reduction.
ISS as an example of a high-order flexible structure (Photo: NASA)
Logo of the open source
toolbox
port-Hamiltonian models and systems of differential
algebraic equations. The resulting new methods guarantee
high approximation accuracy, while being numerically
efficient. Just recently, the free and open-source sssMOR-
Toolbox has been extended by the new psssMOR toolbox
for parametric model reduction.
Modeling and Control of Socio-Technical Systems
As part of the collaborative research center 768 ‘Managing
Cycles in Innovation Processes’, the Chair of Automatic
Control is concerned with the modeling and control of
socio-technical and cyber-physical systems. As opposed
to physical systems, socio-technical systems often inherit
strong uncertainties, complex micro and macro dynamics
and are commonly modeled as agent-based models,
for which no general control-design method is available.
Thus design methods which are valid for a broad class
of dynamical systems, like fuzzy control and learning
algorithms, are in the focus of this research group. While
being primarily developed for socio-technical systems, the
algorithms are also transferred to real plants and machin-
ery for validation and comparison.
Value function resulting from a learning algorithm, trained on a system with
two state variables