

















 188 / 308
188 / 308

188
Automatic Control
Distributed Parameter Systems/Energy-based Modeling and Control
Numerical solution
of the wave equation
under point excitation in
the corner. Upwinding
in the mixed Galerkin
structure-preserving
discretization improves
the approximation quality
A modular flexible link manipulator in the simplest configuration to validate
the fast point-to-point motion control of the flexible beam based on a PH
discretized model
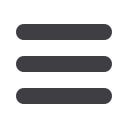
an estimate of the domain of attraction. The main advan-
tage of this approach resides in the controller structure,
which allows the convergence rate of the trajectories to
be accelerated by discretely or continuously scheduling a
single parameter. Nevertheless, as long as the closed-loop
system is not operated in a region sufficiently close to the
MPC closed-loop trajectory (black) and selection of recomputed open-loop
trajectories (colored)
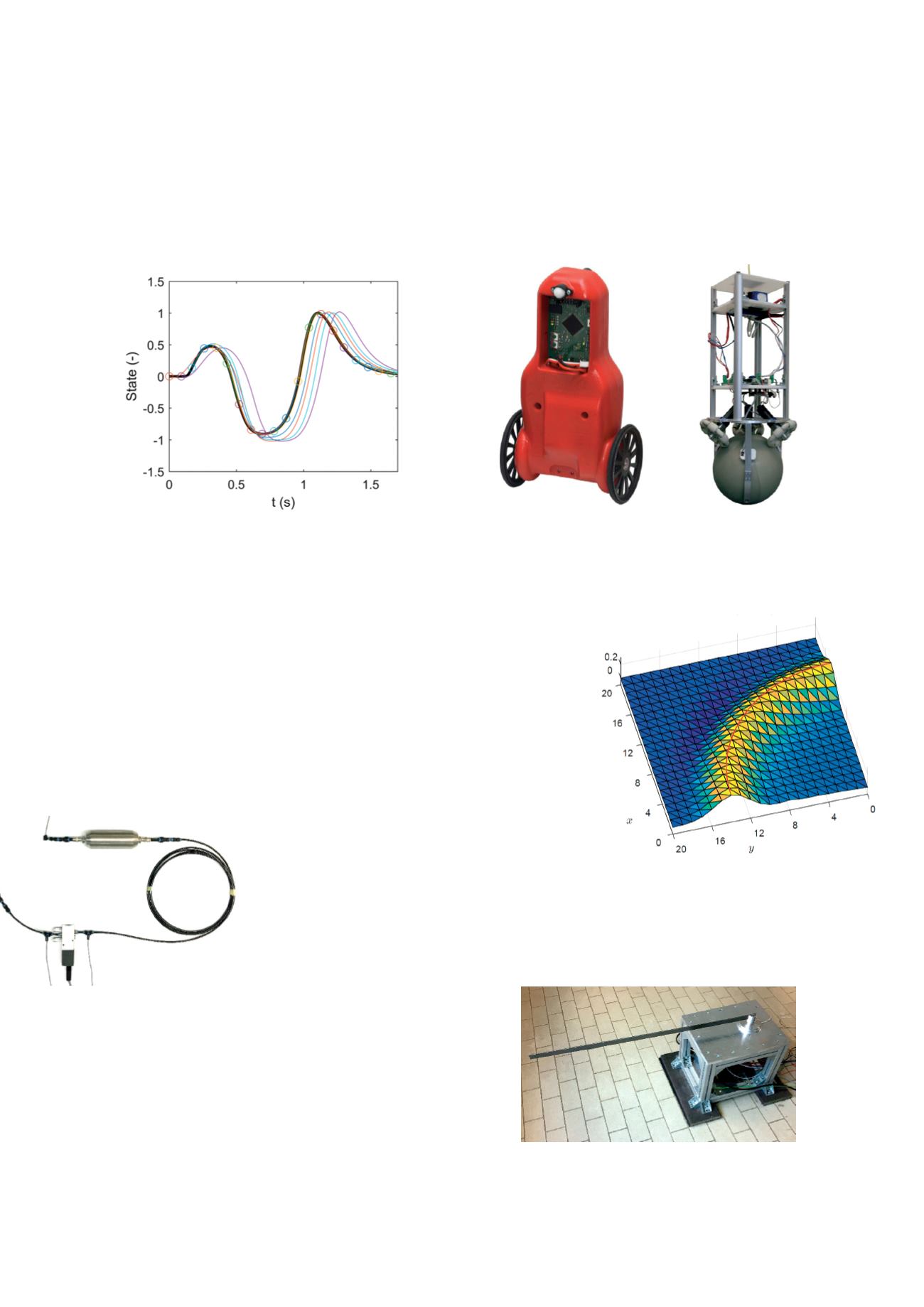
A ballbot and a wheeled inverted pendulum as examples of unstable
nonlinear robots
nominal setpoint, the linearization does not accurately
reflect the behavior of the nonlinear system. Therefore, our
institute conducts further research focusing on regulation
and tracking tasks using different nonlinear approaches,
like command governors and extended linearization.
For the discretization and control of distributed parameter
systems, we develop new techniques that preserve or are
inspired by an energetic model structure. Examples are
all kinds of transport and diffusion phenomena, e.g. the
flow of pressured air through a tube or heat transfer in a
catalytic foam. Also flexible mechanical structures can
be represented in this spirit within the port-Hamiltonian
framework. Current research highlights are:
Modeling, identification
and control of pneumatic
systems.
The benchmark
example of a pneumatic
transmission line with
nonlinear friction is used to
validate different numerical models
and to develop, in a late lumping
approach, flatness-based feedfor-
ward and backstepping feedback
controllers.
Numerical methods for port-Hamiltonian systems.
Preserving the mathematical structure that represents
power exchange and energy storage in port-Hamiltonian
(PH) system models is a desirable feature of discretization
methods. We work on adjustable structure-preserving
discretization schemes in space and time, which are appli-
cable to systems of arbitrary dimension and geometry.
Control of flexible mechanical systems based on PH
models.
We develop feedforward and feedback controllers
for distributed parameter systems based on structured
numerical models in PH form. The flexible link lab manipu-
lator serves as a test bench for experimental validation.
A pneumatic test
bench with its main
components: a
valve, a long pneu-
matic transmission
line and a tank