

















 270 / 308
270 / 308

270
Astronautics
soil sampling instrument, inserted into the lunar regolith,
where a heating element will thermally extract volatile
compounds. The VA will capture the volatiles and guide
them to a miniature mass spectrometer.
In 2017 the LUVMI consortium successfully passed its
mid-term review by the European Commission. In the
coming year LUVMI will see the integration of the com-
plete rover platform and instruments, which will then be
tested in simulated lunar conditions.
ROBEX – Robotic Exploration in Extreme Environments
tool chain for traverse planning optimizes rover trajecto-
ries with regard to terrain properties (i.e. slopes, stay out
zones, etc.) and runs a thermal simulation afterwards.
TUM used this tool chain in order to study a potential
landing site between craters Faustini, Shoemaker, and
Nobile close to the lunar south pole. A lunar rover shall
drive on the surface of the Moon in the search of volatile
elements. The environment at the region of interest
changes with time with temperatures of the surface of
the Moon ranging from 25 K up to about 300 K. Hence,
planning of traverses becomes important in order to meet
scientific goals whilst also meeting engineering require-
ments.
Furthermore, LRT helped to define the thermal design of
an instrument box, called Remote Unit (RU), which houses
a seismometer, an electronic board, and a communication
system. The design was developed to withstand con-
ditions during several lunar day cycles (Phase A study).
Additionally, TUM supports DLR in a study for an optical
instrument in a 3U Cubesat form factor that can operate in
the polar regions of the Moon.
Satellite-based Cooperative
Autonomous Drones Swarm
The LRT participates in the DLR-financed project SKAD
(Satellitengestützter Kooperativ-Autonomer Drohnen-
schwarm), which is led by OHB and started in November
2016. SKAD is a Phase 0 study and investigates possible
mission architectures to explore Valles Marineris on Mars
and search for water and life on the red planet using a
cluster of cooperative, autonomous vehicles. The cluster
consists of a small satellite and several ground vehicles
for example rovers, hominids, and UAVs. LRT research
within SKAD focuses on the communication architecture
and the instrumentation for sample handling.
V HAB – Modeling and Simulation
of Life Support Systems
To fully assess the long-term operation and stability of
life support systems (LSS) for exploration missions, static
analysis methods are insufficient. Establishing mass
balances and selecting technologies based on average
performance values is a fast and proven method for
feasibility studies. Once the initial system design becomes
more detailed, dynamic simulations are required. The
Virtual Habitat (V HAB) modelling tool, a MATLAB®-based
simulation software, enables the dynamic simulation of life
support systems, the humans occupying the simulated
habitat and the mission that is being performed, for more
complex analyses. The simulation system V HAB was val-
idated in 2013 by comparing data from a virtual model of
the International Space Station LSS with actual flight data
(first V HAB-related dissertation). Five additional disserta-
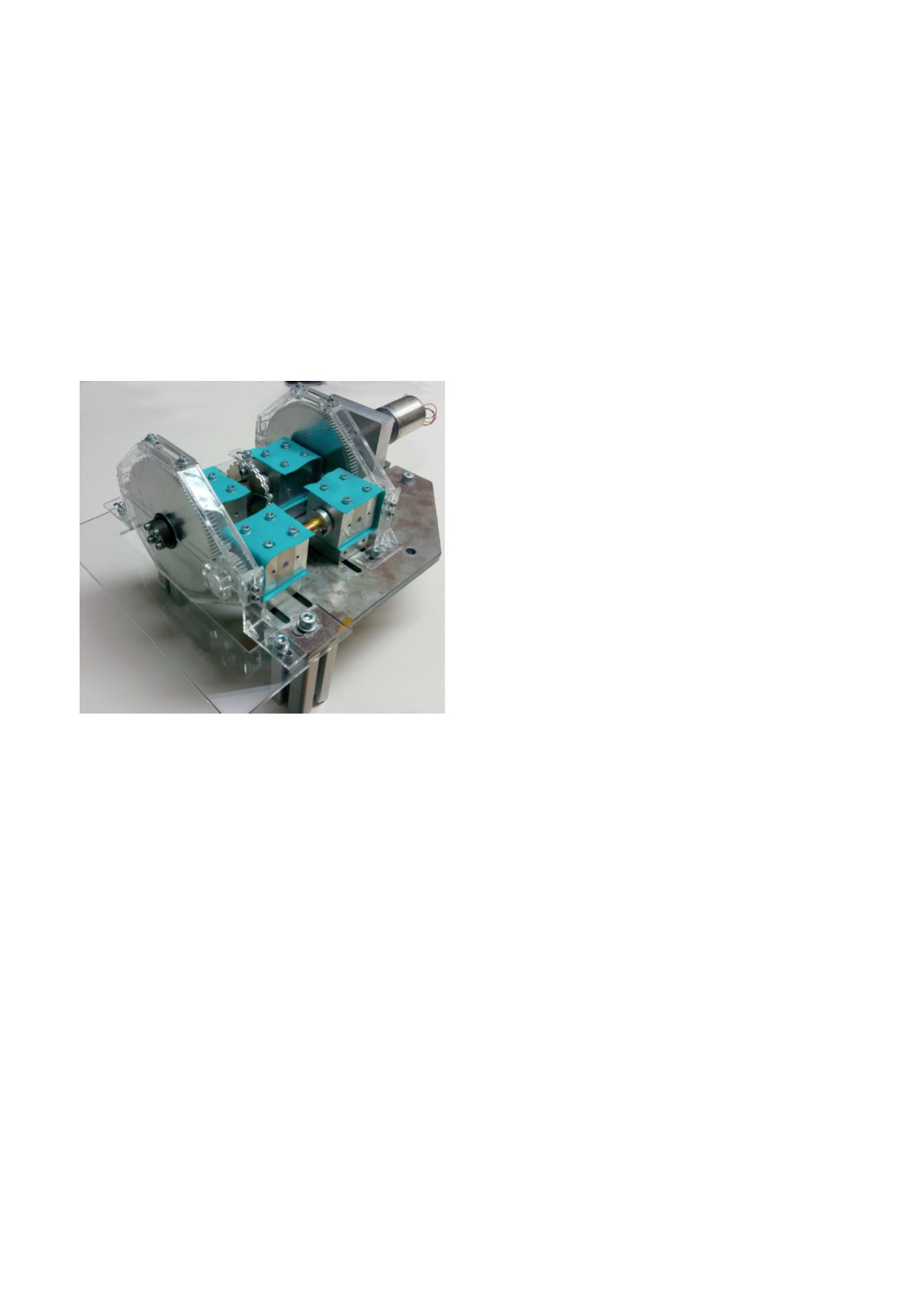
Figure 4. Mechanical spur gear abrasion test setup
The project ROBEX (HA-304), financed by the Helmholtz
Alliance, examines challenges and synergies in robotic
deep sea exploration as well as robotic space exploration.
LRT participates with experimental work on abrasive
effects of accelerated lunar dust particles on typical
spacecraft materials and thermal aspects on robotic
planetary operation, such as traverse planning of rovers
on the lunar surface, temperature stability of samples and
possibilities of energy savings. LRT also provides addi-
tional thermal design support for future instruments to be
used on the surface of the Moon.
Work on lunar dust particle impacts focuses on the
identification and quantitative characterization of possible
damages to technical surfaces and in more detail on
polymer spur gears. Wear of technical surfaces might be
a serious problem for long-term missions on the lunar
surface, especially because of the sharp-edged lunar
regolith particles. Therefore, several technical surfaces
including aluminum alloys and polymers were investigated
using a test setup for abrasive wear.
As part of the project ROBEX, LRT also developed
advanced planetary thermal modeling tools. The current