

















 271 / 308
271 / 308

271
Astronautics
RACOON – Future Technologies for Operating Robots in Space
tions were derived, each adding to V HAB’s already broad
spectrum of capabilities. A dynamic thermal simulation
tool was added to capture the thermal dynamics of mov-
ing objects on the lunar surface (Thermal Moon Simulator,
TherMoS), which can provide valuable input during the
design process of new technical systems. An enhanced
and extended capabilities version of TherMos is used to
characterize the dynamic thermal environment for the
Lunar Polar Sample Return mission lead by the European
Space Agency (ESA), characterizing heat fluxes, solar
lighting conditions and the availability of a direct commu-
nication link to Earth. TherMos data can be exported to
ESATAN TMS, the ESA-mandated commercial analysis
tool, to verify TherMoS results. The current development
of the tool aims at implementing traverse optimization for
rovers as well as astronauts. Hence, TherMoS is going to
be extended towards inclusion of cost and illumination
maps for specific dates at specific locations.
Additionally efforts to improve the dynamic plant model
in V-HAB to perform dynamic system analysis for existing
(ISS) and planned space habitats (Deep Space Habitat,
see ) in combination with plants are currently ongoing.
Two additional ongoing dissertations cover the advance-
ment of hybrid life support system models and the
addition of dynamic crew scheduling algorithms to the
human model. A dissertation regarding the simulation
of portable life support systems for space suits was
completed last year. Peer-reviewed LRT research papers
at the annual International Conference on Environmental
Systems (ICES) expand already strong ties to LSS experts
from NASA and industry (three papers at the ICES 2017
conference). V HAB has a large student participation with
two Bachelor’s, two Master’s and four term paper theses
in 2017.
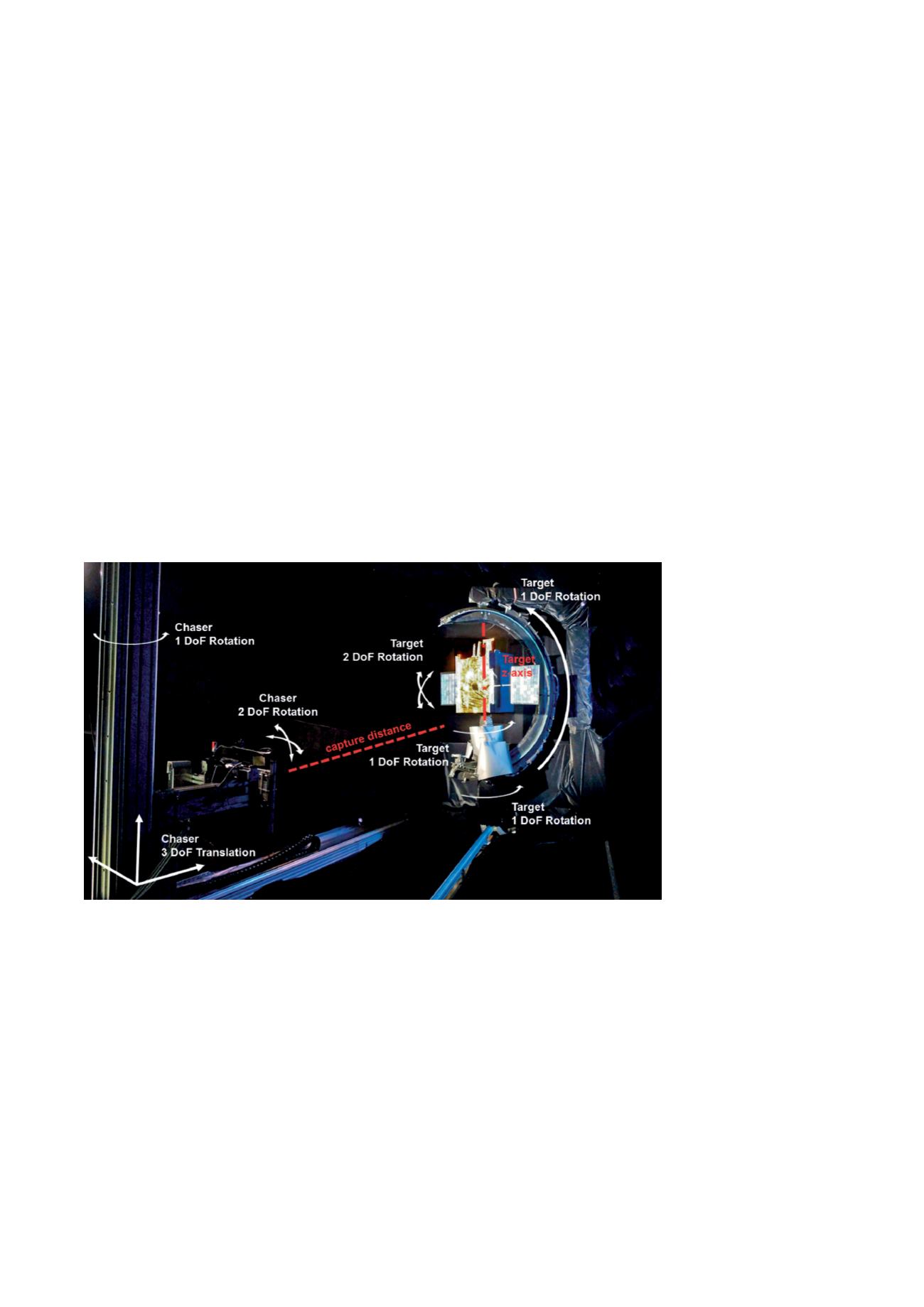
Figure 5. The RACOON
laboratory hardware facility
provides 11 degrees of freedom
to represent any given relative
scenario and to allow endless
rotation despite mechanical
limitations. The target satellite on
the right, representing a generic
geostationary satellite and
approaching satellite (or chaser)
on the left hosting a flexible
sensor platform.
The RACOON Laboratory features a satellite proximity
operations simulation environment consisting of a hard-
ware-in-the-loop simulator that represents position and
attitude of two spacecraft in close proximity, such as dur-
ing for rendezvous and docking maneuvers. The lab pro-
vides realistic lighting conditions with simulated sun and
earth and hardware sensors to simulate realistic sensor
data for the development of new spacecraft technologies
and novel control algorithms. The real-time capabilities
allow the inclusion of a human operator into the control
loop for research in the area of human spacecraft interac-
tion, such as studies of optimal human machine interface
designs or operator workload evaluations.
In 2017, technology developments for on orbit telerobotics
missions focused on vision-based 3D-reconstruction and
experimental human-machine interface studies. 3D-object
reconstruction for virtual reality scenarios is already used
in terrestrial systems, including UAV image processing.
The use of this technology for On-Orbit Servicing (OOS)
missions was investigated in feasibility and performance
tests under realistic environmental orbital conditions. User
studies characterized an experimental Human-Space-
craft-interface using acoustic feedback to spacecraft
operators for enhanced environmental awareness during
on orbit servicing missions.